Коэффициент скольжения двигателя. Большая энциклопедия нефти и газа
В итоге взаимодействия магнитного поля с токами в роторе асинхронного мотора создается крутящий электрический момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного мотора характеризуется величиной скольжения s = (n1 — n2 ) / n2, где n1 — синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного мотора, об/мин. При работе с номинальной нагрузкой скольжение обычно не достаточно, так для электродвигателя, к примеру, с n1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно:s = ((1500 — 1460) / 1500) х 100 = 2,7%
Асинхронный движок не может достигнуть синхронной скорости вращения даже три отсоединенном механизме, потому что при ней проводники ротора не будут пересекаться магнитным полем, в их не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
 В исходный момент запуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного мотора
: f2 = s х
f1, где f1 — частота тока, подводимого к статору.
В исходный момент запуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного мотора
: f2 = s х
f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора находится в зависимости от частоты тока в нем, при этом чем больше частота, тем больше его индуктивное сопротивление. С повышением индуктивного сопротивления ротора возрастает сдвиг фаз меж напряжением и током в обмотках статора.
При пуске асинхронных движков коэффициент мощности потому существенно ниже, чем при обычной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного мотора с конфигурацией скольжения меняется по сложному закону. При уменьшении скольжения в границах 1 — 0,15 сопротивление возрастает, обычно, менее чем в 1,5 раза, в границах от 0,15 до sн ом в 5-7 раз по отношению к исходному значению при пуске.
Ток по величине меняется назад пропорционально изменению эквивалентного сопротивления Таким макаром, при пуске до скольжения порядка 0,15 ток опадает некординально, а в предстоящем стремительно миниатюризируется.
Момент вращения электродвигателя определяется величиной магнитного потока, током и угловым сдвигом меж ЭДС и током в роторе. Любая из этих величин в свою очередь находится в зависимости от скольжения, потому для исследования рабочих черт асинхронных движков устанавливается зависимость момента от скольжения и воздействия на него подводимого напряжения и частоты.
Момент вращения может быть также определен по электрической мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и назад пропорциональная квадрату частоты.
 Соответствующими значениями момента зависимо от скольжения (либо скорости) являются изначальное значение момента
(когда электродвигатель еще неподвижен), наибольшее значение момента
(и соответственное ему сколь жение, называемое критичным) и малое значение момента в пределе скоростей от недвижного состояния до номинальной
.
Соответствующими значениями момента зависимо от скольжения (либо скорости) являются изначальное значение момента
(когда электродвигатель еще неподвижен), наибольшее значение момента
(и соответственное ему сколь жение, называемое критичным) и малое значение момента в пределе скоростей от недвижного состояния до номинальной
.
З начения момента для номинального напряжения приводятся в каталогах для электронных машин. Познание малого момента нужно при расчете допустимости запуска либо самозапуска механизма с полной нагрузкой механизма. Потому его значение для определенных расчетов должно быть или определено, или получено от завода-поставщика.
Величина наибольшего значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не находится в зависимости от величины сопротивления ротора.
Критичное скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обосновано активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Повышение только активного сопротивления ротора сопровождается повышением критичного скольжения и перемещением максимума момента в область более больших скольжений (наименьшей скорости вращения). Таким методом может быть достигнуто изменение черт моментов.
В асинхронных двига телях с фазным ротором изменение момента при разных скольжениях осуществляется при помощи сопротивления, вводимого в цепь обмотки ротора. В асинхронных движках с короткозамкнутым ротором изменение момента может быть достигнуто за счет внедрения движков с переменными параметрами либо при помощи частотных преобразователей .
Школа для электрика
Cтраница 2
Вт номинальное скольжение приблизительно составляет от 6 до 2 % соответственно.
Определить номинальное скольжение асинхронного трехфазного двигателя, ротор которого вращается с частотой й2900 об / мин, если синхронная частота вращения магнитного поля щ3000 об / мин.
Определить номинальное скольжение асинхронного трехфазного двигателя, ротор которого вращается с частотой п 2900 об / мин, если синхронная частота вращения магнитного поля nl 3000 об / мин.
Величина номинального скольжения зависит от сопротивления ротора. Меньшим номинальным скольжением при одинаковой мощности и числе полюсов обладают обычно двигатели с короткозамкнутым ротором нормального исполнения. У этих двигателей в силу конструктивных особенностей сопротивление ротора имеет относительно меньшую величину, что ведет к уменьшению значений критического скольжения SK [ формула (2 - 39) ] и номинального скольжения SH. По тем же причинам при увеличении мощности двигателя падает величина его номинального скольжения и растет жесткость естественной характеристики. Последнее иллюстрируется кривой рис. 2 - 35, построенной по средним данным для двигателей разной мощности.
Величина номинального скольжения зависит от сопротивления ротора. Наименьшим номинальным скольжением при одинаковой мощности и числе полюсов обладают обычно двигатели с короткозамкнутым ротором нормального исполнения. У этих двигателей в силу конструктивных особенностей сопротивление ротора имеет относительно небольшую величину, что ведет к уменьшению значений критического скольжения SK [ формула (2 - 39) ] и номинального скольжения SH. По тем же причинам при увеличении мощности двигателя уменьшается величина его номинального скольжения и растет жесткость естественной харак-теристики. Последнее иллюстрируется кривой рис. 2 - 35, построенной по средним данным для двигателей разной мощности.
| Теоретическая и практическая кривые зависимости момента асинхронной машины от скольжения.| Кривые зависимости момента асинхронного двигателя от скольжения для роторных клеток различного исполнения. |
Повышение номинального скольжения достигается за счет применения роторных клеток с повышенным сопротивлением.
| Зависимость потребного номинального момента двигателя от момента инерции маховика при различных значениях номинального скольжения. |
Увеличение номинального скольжения связано со снижением средней угловой скорости двигателя шор.
Величина номинального скольжения SH колеблется в пределах от 2 до 12 % в зависимости от номинальной мощности и типа электродвигателя нормального исполнения. Двигатели большей номинальной мощности обычно имеют меньшую величину номинального скольжения.
Увеличение номинального скольжения двигателя может привести как к уменьшению, так и к увеличению максимального усилия в штангах в зависимости от режима помпирования; при этом изменение усилия, обусловленное смягчением характеристики двигателя, оказывается в общем случае небольшим.
Выбор номинального скольжения SH у АКД значительно меньше влияет на величину kn, чем при симметричном питании. Часто для повышения kn надо снижать SH. Однако при т 15 возможны случаи, когда при уменьшении SH кратность пускового момента падает. Это объясняется тем, что при меньших значениях SH эллиптичность поля при пуске оказывается большей. Влияние относительного активного сопротивления статора ps и коэффициента рассеяния невелико и неоднозначно. Обычно, если при симметричном питании критическое скольжение SK 1, кратность пускового момента при росте ps и с немного увеличивается или не изменяется совсем, при SK 1 незначительно уменьшается.
При номинальном скольжении по формулам (11.13) - (11.18) определяют КПД т) Р V (Р А Р в) и номинальный момент Мп.
При номинальном скольжении по формулам (11.13) - (11.18) определяют КПД Ц - РК / (РА РВ) и номинальный момент Мн.
Вращающееся магнитное поле статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника, взаимодействуя с полем статора, создает электромагнитную силу — F эм. Совокупность сил всех проводников обмотки создает электромагнитный момент М, который приводит ротор во вращение в направлении вращающего поля.
Принцип действия асинхронного электродвигателя
Частота вращения ротора n 2 будет всегда меньше синхронной частоты n 1 , то есть ротор всегда отстает от поля статора. Поясним это следующим образом. Пусть ротор вращается с частотой n 2 равной частоте статора n 1 . В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно, в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий момент М = 0. Таким образом, ротор асинхронного электродвигателя принципиально не может вращаться синхронно c полем статора. Разность между частотами поля статора n 2 и ротора n 1 называется частотой скольжения Δ n.
Отношение частоты скольжения к частоте поля называется скольжением:
В общем случае скольжение в может изменяться от нуля до единицы. Однако номинальное скольжение S н обычно составляет от 0,01 до 0,1 %. Преобразуя формулу скольжения, получим выражение частоты вращения ротора:
![]()
Обмотка ротора асинхронного электродвигателя электрически не связана с обмоткой статора. В этом отношении подобен , в котором обмотка статора является первичной обмоткой, а обмотка ротора — вторичной. Разница состоит в том, что ЭДС в обмотках трансформатора наводится неизменяющимся во времени магнитным потоком, а — потоком постоянным по величине, но вращающимся в пространстве. Эффект в том и в другом случаях будет одинаковым. В отличие от вторичной обмотки трансформатора, неподвижной, обмотка ротора электродвигателя вместе с ним вращается.
ЭДС роторной обмотки, в свою очередь, зависит от частоты вращения ротора. В этом нетрудно убедиться, анализируя процессы, протекающие в асинхронном электродвигателе.
Синхронная частота вращения магнитного поля статора перемещается относительно ротора с частотой скольжения Δ n. Она же наводит в обмотке ротора ЭДС E 2 , частота которой f 2 связана со скольжением S:
Учитывая, что f 1 =рn 1 /60, f 2 =рn 1 S/60.
Приняв величину номинального скольжения порядка 0,01-0,1, можно подсчитать частоту изменения ЭДС в роторной обмотке, которая составляет 0,5-5 Гц (при f 1 =50 Гц).
В процессе взаимодействия магнитного поля и тока в роторе асинхронного электродвигателя создается вращающий момент, который позволяет уровнять скорость статора, ротора и вращения электромагнитного поля. Величина скольжения характеризуется скоростью вращения ротора, статора и магнитного поля.
От чего зависит величина скольжения электродвигателя
- Как правило, скольжение относительно невелико при работе электродвигателя с номинальной нагрузкой. Например, при работе электромотора 1500 оборотов в минуту скольжение равно 2,7%.
- Асинхронные электродвигатели не могут достичь синхронной скорости даже, если отсоединить механизм. Проводники ротора никогда не будут пересекаться с магнитным полем, в них не будет ЭДС, соответственно не будет и тока. При этом асинхронный момент будет равен нулю.
- В момент пуска в обмотку ротора поступает ток, соответствующий частоте сети. По мере ускорения частота тока будет определена скольжением. При этом сопротивление ротора будет зависеть от частоты тока. Индуктивное сопротивление будет возрастать по мере увеличения частоты тока.
- Величины эквивалентного сопротивления изменяются в соответствии с законами физики. Если скольжение электродвигателя уменьшается, сопротивление соответственно увеличивается.
- При пусковом моменте до развития скольжения в пределах 0,15 сила сопротивления уменьшается незначительно. При дальнейшей работе наоборот – быстро уменьшается. Величина момента вращения определяется соответствующей величиной магнитного потока, поступающего тока и сдвигом между параметрами ЭДС, тока в роторе. Зависимость момента скольжения и напряжения с частотой устанавливается в ходе проведения исследования технических характеристик производителями электромоторов.
Определение величины скольжения электродвигателя
Предопределяющим моментом в прямой зависимости от скольжения является начальное значение того момента, когда электродвигатель остается еще в неподвижном состоянии. Максимальное значение скольжения называется критическим.
Конкретные расчеты производят специалисты завода-изготовителя, и они указаны в соответствующих технических характеристиках, прилагаемых к электродвигателю при покупке. При увеличении активного сопротивления только ротора увеличивается значение критического скольжения и уменьшается скорость вращения вала. Изменить данные параметры можно путем использования дополнительного сопротивления, которое вводится в цепь обмотки ротора.
Как известно, ротор асинхронного двигателя вращается в ту же сторону, что и магнитное поле со скоростью, несколько меньшей скорости вращения поля, так как только при этом условии в обмотке ротора будут индуцироваться ЭДС и токи и на ротор будет действовать вращающий момент.
Обозначим скорость вращения поля (синхронная скорость) через а скорость вращения ротора через 2Тогда разность 3называемая скоростью скольжения, будет представлять собой скорость ротора относительно поля, а отношение скорости скольжения к синхронной скорости, выраженное в процентах, называют скольжением 4
![]()
Выразим скольжение s через угловые скорости вращения поля и ротора
![]()
![]()
Полученные выражения подставим в формулу скольжения (5.7)
![]()
Выясним влияние скольжения на мощность, развиваемую двигателем.
Пусть мощность, потребляемая двигателем, мощность, развиваемая ротором при его вращении. Тогда
длина окружности ротора, R - его радиус, и - силы, действующие на ротор (соответственно электромагнитная и механическая). Тогда
![]()
Взяв отношение получим:
![]()
но (обе силы электромагнитные и в установившемся режиме вращения действие равно противодействию), тогда
откуда окончательно имеем:
![]()
Из полученного соотношения следует, что мощность развиваемая ротором асинхронного двигателя, зависит от скольжения 5.
Если скольжение выражать в процентах, то от мощности потребляемой двигателем из сети, преобразуется в механическую мощность, а остальные мощности расходуются на покрытие потерь в двигателе, поэтому для получения высокого КПД двигателя скольжение необходимо делать возможно меньшим.
На практике у двигателей мощностью от 1 до 1000 кВА при номинальной нагрузке скольжение составляет 3-6%, а при больших мощностях - 1-3%. Так, при скоростях вращения магнитного поля 3000, 1500 и 1000 об/мин скорости вращения ротора обычно имеют соответственно значения 2800,1410 и 930 об/мин.
37. Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя
n = n 1 (1 – s) = (60f 1 /p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f 1 питающего напряжения, число пар полюсов р и
 Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а - при четырех полюсах; б -
при двух полюсах
Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а - при четырех полюсах; б -
при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу М вн и частоты f 1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) - двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n 1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n 1 , то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n 1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
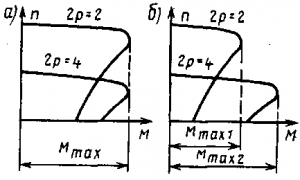 Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
 Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
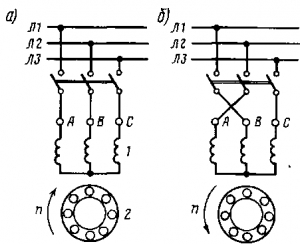 Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
Статьи по теме