От чего зависит частота вращения электродвигателя. Регулирование скорости вращения асинхронных электродвигателей
Большинство насосов приводятся в действие с помощью асинхронных электродвигателей, это означает, что двигатели вносят вклад в общую эффективность насосной системы.
Данная статья посвящена исследованию ключевых аспектов эффективности электродвигателя, которые находятся под контролем пользователя. 2/3 всей вырабатываемой электроэнергии, потребляются электродвигателями, которые используются в различном оборудовании на промышленных площадках всего мира.
Электродвигатели развиваются на протяжении последних 150 лет. Не смотря на то, что существует большой выбор из различных конструкций двигателей (например синхронные, асинхронные или постоянного тока), наиболее используемым в промышленности на сегодняшний день является асинхронный электродвигатель переменного тока, т.к. является более надежным. Также асинхронный электродвигатель предпочтительнее при использовании частотного преобразователя. Достаточно высокая эффективность в сочетании с простотой изготовления, высокой надежностью и низкой ценой делает его самым широко-применяемым типом двигателя по всему миру.
Рисунок 1: Асинхронный электродвигатель с короткозамкнутым ротором
На рисунке 1 показана обычная компоновка асинхронного электродвигателя с тремя обмотками статора, которые расположены вокруг сердечника. Обмотка ротора состоит из медных или алюминиевых стержней, торцы которых накоротко замкнуты кольцами. Кольца изолированы от ротора. В подшипниковом узле, как правило, используются шарикоподшипники с консистентной смазкой, за исключением очень больших двигателей. Смазка масляным туманом может значительно увеличить срок службы подшипников. Во всех асинхронных электродвигателях используется трехфазный ток, за исключением самых маленьких промышленных процессов (ниже 2 л.с.). Для запуска фазных двигателей необходимы другие средства, такие как щетки или конденсаторный пуск (использование конденсатора во время пуска).
Проблема эффективности двигателя
При использовании электродвигателя в качестве привода насоса потери энергии и падение давления в результате неэффективности насоса обычно гораздо больше, чем потери энергии связанные с неэффективностью электродвигателя, но они не являются незначительными. Оптимизация эффективности электродвигателя насоса может обеспечить реальную экономию стоимости рабочего цикла на протяжении всего срока службы насоса/электродвигателя. Ключевыми факторами, которые влияют на эффективность асинхронного двигателя являются:
- относительная нагрузка двигателя (негабаритные двигатели находящиеся под нагрузкой)
- скорость вращения (число полюсов)
- размер двигателя (номинальная мощность)
- класс двигателя: обычный КПД в сравнении с энергоэффективностью в с равнении с высоким КПД
Как показано на рисунке 2, эффективность асинхронного электродвигателя изменяется вместе с
относительной нагрузкой на электродвигатель по сравнению с номинальной характеристикой. Вплоть до нагрузки в 50% эффективность большинства электродвигателей остается линейной и для некоторых электродвигателей достигает пика у отметки 75%. Электродвигатели могут работать при нагрузке меньше 50% только в течение короткого промежутка времени и не могут эксплуатироваться при нагрузках меньше 20% от номинальных. Таким образом, когда отрегулированные рабочие колеса или насосы возвращаются к своим кривым "напор-подача", необходимо оценить воздействие относительной нагрузки на электродвигатель. ![]()
Рисунок 2: Эффективность электродвигателя для 100-сильных моторов - Обычные кривые характеристик при нормальном диапазоне нагрузок электродвигателя
Скорость вращения
На рисунке 2 также показано влияние скорости вращения на максимально-достижимую эффективность. 4-х полюсный электродвигатель при номинальных 1800 об/мин выходит на самый высокий КДП, а 2-х полюсный при номинальных 3600 об/мин дает низкую эффективность. Таким образом, хотя насосы с номинальной частотой вращения 3600 об/мин могут быть более эффективными (и иметь низкую закупочную стоимость), чем насосы со скоростью вращения 1800 об/мин, электродвигатели последних могут быть более эффективными, плюс эти насосы, как правило, имеют более низкий NPSHR и энергию всасывания, не говоря уже о более длительном сроке службы. Также следует отметить, что номинальная мощность электродвигателя влияет на его эффективность, большие электродвигатели имеют большую эффективность, чем малые.
Скорость вращения асинхронного электродвигател я
Синхронная скорость вращения асинхронного электродвигателя рассчитывается по следующей формуле:
n = 120*f/p
где:
n
= скорость вращения в об/мин
f
= частота питающей сети (Гц)
p
= количество полюсов (min = 2)
Для регулирования частоты вращения электродвигателя без использования внешних механических устройств необходимо регулировать напряжение и частоту подаваемого тока. Некоторые электродвигатели могут быть изготовлены с несколькими обмотками (количество полюсов) для достижения двух или более различных скоростей вращения.
Асинхронные электродвигатели вращаются со скоростью, которая меньше скорости вращения магнитного поля (на 1-3% при полной нагрузке). Разница между фактической и синхронной частотой вращения называется скольжением. Для новых более энергоэффективных электродвигателей скольжение имеет тенденцию уменьшаться в отличие от старых электродвигателей с обычным КПД. Это означает, что при заданной нагрузке энергоэффективные электродвигатели работают немного быстрее.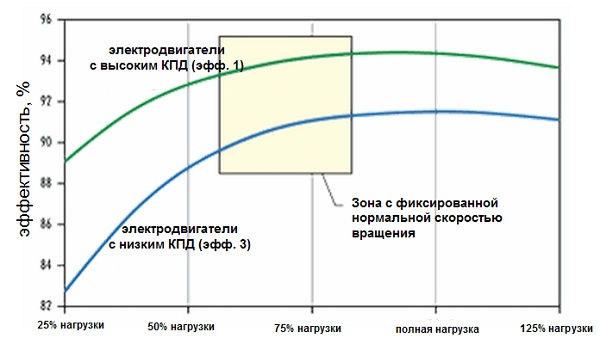
Рисунок 3. Эффективность при полной и частичной загрузке двигателя с низким и высоким КПД
Электродвигатели с высоким КПД
На рисунке 3 изображен пример возможного повышения эффективности, когда старый электродвигатель с обычной эффективностью заменяется новым, имеющим более высокий КПД. Как упоминалось ранее, электродвигатели с высоким КПД работают с меньшим скольжением, что дает некоторое увеличение скорости вращения, а следовательно напор насоса и производительность становятся несколько больше.
Однако, использование электродвигателей с высоким КПД в некоторых (с изменением подачи) процессах будет не оправданно, из-за большей скорости вращения (и напора насоса), до тех пор пока существующие электродвигатели по-прежнему слабо загружены (работающие с низким КПД). Т.к. входная мощность на валу насоса пропорциональна скорости в кубе, простая замена старого электродвигателя новым с высоким КПД не обязательно приведет к снижению потребления энергии.
С другой стороны, если немного большая подача и напор для насоса - это хорошо, замена старого
электродвигателя с обычным КПД на новый с высоким КПД может быть оправдана.
Коэффициент мощности электродвигателя
Другая проблема, которая входит в игру с характеристиками асинхронного электродвигателя (которая имеет косвенное влияние на энергопотребление) называется "Коэффициент Мощности
". Некоторые
коммунальные предприятия обязывают клиентов платить дополнительные сборы за низкие значения
коэффициентов мощности. Потери в сети происходят за счет того, что при меньшем коэффициенте
мощности требуется большее количество тока, что приводит к серьезным потерям энергии. Как и КПД,
коэффициент мощности электродвигателя также снижается с уменьшением нагрузки на него практически по линейному закону приблизительно до 50% нагрузки.
Определение коэффициента мощности:
Фазовый сдвиг (задержка) синусоидальной волны тока от синусоиды напряжения, который выбарабывает меньшее количество полезной мощности.
Сдвиг, вызванный необходимым током намагничивания двигателя
PF = Pi/KVA
Где:
KVA = VxIx(3) 0.5 /1,000
Нижняя формула показывает, как коэффициент мощности влияет на входную мощность трехфазного
электродвигателя (кВт). Обратите внимание, что чем ниже коэффициент мощности (больший сдвиг фазы ток-напряжение VA), тем меньше входная мощность при данном входном токе и напряжении.
Где:
Pi = VxIxPF(3) 0.5 /1,000
Pi
= трехфазный вход кВт
V
= среднеквадратичное напряжение (среднее от 3 фаз)
I
= среднеквадратичное значение силы тока в амперах (берется от 3 фаз)
PF
= коэффициент мощности в виде дроби
Хотя коэффициент мощности не влияет напрямую на КПД электродвигателя, он оказывает влияние на потери в сети, как это упоминалось выше. Однако, есть способы увеличения PF (коэффициента мощности), а именно:
- покупка электродвигателей с изначально высоким PF
- не покупайте слишком большие электродвигатели (коэффициент мощности падает вместе с уменьшением
- нагрузки на электродвигатель)
- установка компенсирующих конденсаторов параллельно с обмотками электродвигателя
- увеличить полную загрузку коэффициента мощности до 95% (Max)
- преобразование в привод с частотным регулированием
- увеличение PF
- меньшение реактивного тока от электрооборудования через кабели и пускатели электродвигателейменьшее тепловыделение и потери мощности кВт
- По мере уменьшения нагрузки на электродвигатель растет возможность экономии, а PF
- падает ниже 60%-70%. (возможная экономия 10%)
- Уменьшение сборов за коэффициент мощности
- Увеличение общей производительности системы
- Интеллектуальная система управления электродвигателем
- Частотно-регулируемый электропривод
Другим способом повышения КПД электродвигателя является повышение рабочего напряжения. Чем выше напряжение, тем ниже ток и, тем самым будут ниже потери в сети. Однако, высокое напряжение приведет к увеличению цены частотно-регулируемого привода и сделает работу более опасной.
Выводы
Таким образом, когда вы пытаетесь сократить энергопотребление насосных систем не забывайте о
КДП электродвигателя и факторах, перечисленных выше, которые на него влияют.
1. Способы регулирования асинхронного двигателя
2. Частотное регулирование асинхронных электроприводов
3. Регулирование скорости, тока и момента с помощью резисторов в цепях ротора и статора
4. Регулирование скорости АД изменением числа пар полюсов 1. Способы регулирования асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s:
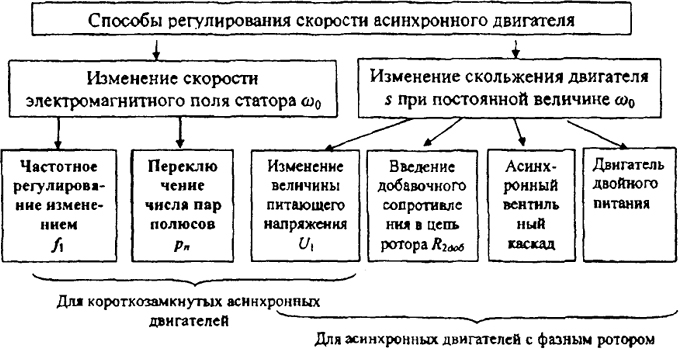 Рис.1. Классификация способов регулирования асинхронных двигателей
Рис.1. Классификация способов регулирования асинхронных двигателей
Исходя из (1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0.
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора f1, и числом пар полюсов двигателя рп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
Плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
Экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
2. Частотное регулирование асинхронных электроприводов
Принципиальная возможность регулирования угловой скорости асинхронного двигателя изменением частоты питающего напряжения вытекает из формулы ω = 2πf1 (1 - s)/p. При регулировании частоты также возникает необходимость регулирования амплитуды напряжения источника, что следует из выражения U1 ≈ Е1 = kФf1. Если при неизменном напряжении изменять частоту, то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении частоты поток возрастет, и это приведет к насыщению стали машины и как следствие к резкому увеличению тока и превышению температуры двигателя; при увеличении частоты поток будет уменьшаться и как следствие будет уменьшаться допустимый момент.
Для наилучшего использования асинхронного двигателя при регулировании угловой скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки, что реализуемо только в замкнутых системах электропривода. В разомкнутых системах напряжение регулируется лишь в функции частоты по некоторому закону, зависящему от вида нагрузки.
Частотное регулирование угловой скорости электроприводов переменного тока с двигателями с короткозамкнутым ротором находит все большее применение в различных отраслях техники. Например, в установках текстильной промышленности, где с помощью одного преобразователя частоты, питающего группу асинхронных двигателей, находящихся в одинаковых условиях, плавно и одновременно регулируются их угловые скорости. Примером другой установки с частотно-регулируемыми асинхронными двигателями с короткозамкнутым ротором могут служить транспортные рольганги в металлургической промышленности, некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхронных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (для привода электрошпинделей в металлорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования особенно существенны для приводов, работающих в повторно-кратковременном режиме, где имеет место частое изменение направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой скорости находят применение преобразователи, на выходе которых по требуемому соотношению или независимо меняется как частота, так и амплитуда напряжения. Преобразователи частоты можно разделить на электромашинные и вентильные. В свою очередь электромашинные преобразователи могут быть выполнены с промежуточным звеном постоянного тока и непосредственной связью. В последних используют коллекторную машину переменного тока, на вход которой подают переменное напряжение с постоянной частотой и амплитудой, а на выходе ее получают напряжение с регулируемой частотой и амплитудой. Электромашинные преобразователи с непосредственной связью практического применения не получили.
3. Регулирование скорости, тока и момента с помощью резисторов в цепях ротора и статора
Вытекает, что регулирование скорости вращения асинхронных электродвигателей можно осуществить:
изменением частоты питающего тока;
изменением числа «ар полюсов обмотки статора;
введением дополнительных сопротивлений в цепь обмотки ротора.
Первые два способа используются для регулирования скорости вращения электродвигателей с короткозамкнутым ротором, а последний - электродвигателей с фазным ротором (с контактными кольцами).
Регулирование скорости вращения изменением частоты питающего тока используется очень редко, так как этот способ применим лишь в случае, когда электродвигатель питается от отдельного генератора. В этом случае для регулирования скорости необходимо менять скорость вращения питающего генератора в такой же пропорции, е какой должна меняться скорость регулируемого электродвигателя. Бели же электродвигатель питается от сети трехфазного тока, то осуществить регулирование его скорости изменением частоты невозможно. На практике регулирование скорости изменением частоты применяется лишь в. гребных электрических установках переменного тока, в которых мощные гребные электродвигатели получают питание от отдельных генераторов и поэтому частоту питающего тока можно регулировать произвольно.
Наиболее часто на практике применяется второй способ, позволяющий достаточно просто осуществлять ступенчатое регулирование скорости вращения асинхронных электродвигателей с короткозамкнутым ротором. Если имеется возможность изменять число пар полюсов обмотки статора [см. формулу (80) ] то, следовательно, имеется возможность ступенчатого регулирования скорости вращения электродвигателя, так как число пар полюсов может быть равно 1, 2, 3 и т. д. Электродвигатели, допускающие переключение числа пар полюсов, должны иметь в пазах статора либо несколько независимых обмоток, либо одну обмотку со специальным переключающим устройством. Отечественная промышленность выпускает двух-, трех- и четырех- скороетные электродвигатели, используемые:в основном на морском транспорте и на некоторых кранах. Когда числа полюсов значительно отличаются друг от друга, двух скор осиные электродвигатели изготовляются с двумя независимыми обмотками. Одна, например, может быть выполнена на 2р = 2, а вторая на 2р = 8 полюсов. Тогда при подключении к сети первой обмотки магнитное поле статора будет вращаться со скоростью n 1 = 60·50 / 1 = 3000 об /мин , а при подключении к сети второй обмотки - со скоростью n 1 = 60·50 / 4 = 750 об /мин . Соответствующим образом будет изменяться при этом и скорость вращения ротора n 2 = n 1 (1-s ).
Часто в пазы статора двухскоростного электродвигателя закладывают одну обмотку, но выполняют ее так, чтобы можно было включать ее при необходимости треугольником (рис. 49, а ) и двойной звездой (рис. 49, б ). При включении такой обмотки треугольником число полюсов равно 2р = 2а , а при включении двойной звездой 2р = а (где а - любое целое число), т. е. при переходе от треугольника к двойной звезде число пар полюсов статорной обмотки уменьшается вдвое, а скорость электродвигателя возрастает вдвое.
Регулирование переключением числа пар полюсов применяется только для электродвигателя с короткозамкнутым ротором, потому что у электродвигателей с фазным ротором одно
временно с переключением обмотки статора требуется переключать и обмотку ротора, что усложняет конструкцию электродвигателя и переключающего устройства. Данный способ регулирования скорости отличается высокой экономичностью, но он не лишен и недостатков. В частности, регулирование скорости происходит не плавно, а скачками, требуется довольно сложное переключающее устройство, в особенности при числе скоростей большем двух; при переходе с одной скорости на другую разрывается цепь статора, при этом неизбежны толчки тока и момента, коэффициент мощности при низших скоростях ниже, чем при высших из-за увеличения рассеяния магнитного потока.
Регулирование скорости введением дополнительных сопротивлений в цепь ротора возможно только у электродвигателей с фазным ротором. Согласно уравнению (97) , при введении различных активных сопротивлений в цепь ротора жесткость характеристик изменяется (рис. 50), т. е. при одной и той же нагрузке скорость электродвигателя будет различной. Очевидно, чем выше величина дополнительного сопротивления, тем мягче искусственная характеристика и тем ниже скорость электродвигателя.
Допустим электродвигатель работает с установившейся скоростью n 1 на естественной характеристике а в точке 1 , развития некоторый вращающий момент М 1 = М c . При введении в цепь ротора некоторого сопротивления R 1 электродвигатель перейдет на работу по характеристике b , уравнение которой
Так как в момент включения сопротивления скорость электродвигателя практически не изменится, переход с характеристики а на характеристику b произойдет по горизонтали 1 -2 , причем вращающий момент электродвигателя снизится до М 2 , который меньше момента сопротивления механизма М , поэтому скорость электродвигателя будет падать, а скольжение возрастать. При возрастании скольжения момент, согласно выражению (92) , увеличивается до тех пор, пока момент электродвигателя вновь не станет равным моменту сопротивления механизма, после чего наступит равновесие моментов и двигатель будет вращаться с новой установившейся скоростью n 3 (точка 3 ).
При необходимости дополнительно может быть включено сопротивление R 2 . Тогда скорость электродвигателя снизится до величины n 5 . При отключении сопротивлений скорость электродвигателя будет возрастать, при этом переход с одной характеристики на другую происходит в обратном порядке, как показано на рис. 50.
Последний способ позволяет получить широкий диапазон скоростей, но является крайне неэкономичным, так как при увеличении активного сопротивления цепи ротора растут потери энергии в электродвигателе, а значит уменьшается его к. п. д. Сами регулировочные реостаты, особенно для мощных электродвигателей, получаются громоздкими и выделяют много тепла.
Необходимо также иметь в виду, что большинство электродвигателей в настоящее время выполняется с самовентиляцией.
Вследствие этого при понижении скорости вращения охлаждение ухудшается и электродвигатель не может развивать номинальный вращающий момент.
Основным преимуществом электродвигателей с параллельным возбуждением является возможность широкого и плавного регулирования их скорости вращения.
Уравнения, выведенные в особенностях электродвигателей постоянного тока , показывают, что искусственная регулировка скорости вращения может производиться тремя способами: изменением сопротивления якорной цепи, изменением магнитного потока и изменением напряжения, подводимого к якорю.
Регулирование скорости вращения изменением сопротивления якорной цепи. Для регулирования скорости вращения электродвигателя в цепь якоря последовательно включают дополнительные сопротивления (см. рис. 10 ). Уравнение (30) показывает, что каждому новому значению дополнительного сопротивления соответствует своя искусственная механическая характеристика. То же самое относится и к скоростным характеристикам. Анализ этого уравнения показывает, что между сопротивлением якорной цепи и скоростью вращения существует линейная зависимость, т. е. при любом значении R характеристики электродвигателя остаются прямолинейными и при холостом ходе проходят через точку п = п 0 . Очевидно, чем выше величина дополнительного сопротивления, тем мягче искусственная характеристика электродвигателя (рис. 12). Это означает, что при одной и той же нагрузке скорость электродвигателя тем ниже, чем выше величина дополнительного сопротивления, включенного в якорную цепь. Уменьшение скорости объясняется дополнительным падением напряжения в добавочном сопротивлении.
Процесс перехода от одной скорости к другой происходит следующим образом. Допустим, электродвигатель, развивая момент М = М с , работает устойчиво на естественной характеристике а в точке 1 (контакты 1У , 2У и 3У на рис. 10 замкнуты). Если необходимо снизить скорость вращения электродвигателя, размыкают контакт 1У и тем самым в цепь якоря вводят дополнительное сопротивление R 1 . Согласно уравнению (30) электродвигатель должен перейти на характеристику b , соответствующую новому значению сопротивления якорной цепи. Электродвигатель обладает значительной инерцией и при переключении сопротивлений скорость его вращения мгновенно измениться не может. Поэтому в первый момент электродвигатель переходит на работу в соответствующей точке 2 на характеристике b . При этом ток якоря и вращающий момент уменьшаются, нарушается равновесие моментов (М <М c ) и скорость электродвигателя начинает снижаться до тех пор, пока снова не восстановится равновесие моментов (М = М с ). Следовательно, устойчивая работа электродвигателя будет теперь в точке 3 на характеристике b .
Аналогичным образом происходит переход на характеристики с и d при включении сопротивлений R 2 и R 3 .
Для увеличения скорости вращения электродвигателя необходимо отключить часть дополнительного сопротивления. Например, если электродвигатель устойчиво работает в точке 7 на характеристике d , то при отключении сопротивления R 3 (при замыкании контактов 3У ) происходит переход на работу по характеристике с . При этом первоначально (в точке 8 ) резко увеличивается ток и момент электродвигателя и скорость начинает возрастать. В точке 5 восстанавливается равновесие моментов и увеличение скорости прекращается. При последовательном отключении остальных ступеней регулировочного реостата происходит постепенное возрастание скорости вращения до величины n 1 .
Данный способ регулирования скорости вращения отличается простотой электрической схемы и применяется сравнительно часто для электродвигателей крановых механизмов. Однако ему присущи и некоторые существенные недостатки. В частности, регулирование скорости рассмотренным способом сопровождается большими.потерями мощности в реостате. Поэтому стараются применять его лишь в тех случаях, когда мощность электродвигателя невелика или снижение скорости вращения должно быть кратковременным. Большим недостатком является также громоздкость и высокая стоимость регулировочного реостата, который должен быть рассчитан на номинальный ток электродвигателя. Это заставляет уменьшать число ступеней реостата и предусматривать специальные меры для его охлаждения.
Регулирование скорости вращения изменением магнитного потока. Если в цепь обмотки возбуждения включить последовательно реостат (см. рис. 10), то скорость вращения электродвигателя с параллельным возбуждением можно регулировать изменением магнитного потока. Для этого необходимо изменять величину сопротивления цепи возбуждения. Изменение сопротивления приводит к изменению тока возбуждения и, следовательно, к изменению магнитного потока электродвигателя. Очевидно, при отсутствии дополнительного сопротивления в цепи возбуждения магнитный поток электродвигателя имеет максимальное значение. Ему соответствуют естественные скоростная и механическая характеристики.
При введении же дополнительного сопротивления в цепь возбуждения магнитный поток уменьшается, а скорость увеличивается, причем, различным значениям магнитного потока соответствуют различные искусственные скоростная и механическая характеристики (рис. 13). Уравнения этих характеристик н.ичем не отличаются от уравнений (25) и (29) .
Из уравнений вытекает, что характеристики при различных значениях магнитного потока остаются прямолинейными, причем меньшим значениям магнитного потока соответствуют большие значения скорости холостого хода. По мере снижения магнитного потока возбуждения жесткость характеристик электродвигателя несколько уменьшается, что объясняется влиянием реакции якоря.
Как было показано, в случае регулирования скорости изменением сопротивления в цепи якоря переход с одной характеристики на другую осуществляется практически при постоянной скорости. Это объясняется малой индуктивностью якоря, благодаря чему ток якоря изменяется практически мгновенно.
Обмотка же возбуждения электродвигателя.параллельного возбуждения обладает значительной индуктивностью. Поэтому в случае регулирования скорости изменением сопротивления цепи возбуждения переход с одной характеристики на другую осуществляется по так называемым динамическим характеристикам, которые могут быть построены в результате расчета переходных процессов. На рис. 13 динамические характеристики показаны пунктирной линией.
Регулирование скорости вращения электродвигателей с параллельным возбуждением изменением магнитного потока сопровождается незначительными потерями мощности в регулировочном реостате и является экономичным. Незначительные потери дают возможность использовать реостат небольших габаритов и веса, с большим числом регулировочных ступеней, что позволяет получить плавное, практически бесступенчатое регулирование скорости.
Недостатком данного способа регулирования скорости является ухудшение коммутации и снижение перегрузочной способности электродвигателя при повышенных скоростях. Скорость же при этом способе регулирования может изменяться только лишь в сторону увеличения по сравнению с номинальной, что сильно ограничивает применение данного способа. При больших нагрузках данный способ регулирования скорости вообще неприменим, так как снижение магнитного потока уменьшает вращающий момент и при переходе к высшей скорости может возникнуть недопустимо большой ток.
Регулирование скорости вращения изменением напряжения на зажимах якоря (система генератор-двигатель). В целях широкого и плавного регулирования скорости иногда применяют так называемую систему генератор-двигатель (сокращенно система Г-Д), которая позволяет использовать метод регулирования скорости изменением напряжения, подводимого к якорю электродвигателя. При питании электродвигателя от сети такой метод совершенно неприменим. Его применение возможно лишь при питании электродвигателя от отдельного генератора.
Обычно система Г-Д состоит из приводного двигателя ПД , генератора Г с возбудителем В и исполнительного электродвигателя ИД (рис. 14). Приводной электродвигатель питается от сети и служит для приведения во вращение генератора. Чаще всего в качестве приводного электродвигателя используется асинхронный короткозамкнутый электродвигатель, получающий питание от сети трехфазного тока. Он имеет постоянное направление вращения и вращается с постоянной скоростью. Исполнительный электродвигатель получает питание от генератора Г и приводит в действие механизм.
Генератор и исполнительный электродвигатель имеют независимое возбуждение. Их обмотки возбуждения ОВГ и ОВД питаются от возбудителя В , небольшого генератора постоянного тока, сидящего на одном валу с приводным электродвигателем ПД и генератором Г . Если в цепь обмотки ОВГ включить регулировочный реостат, то, изменяя величину его сопротивления, можно изменять скорость вращения исполнительного электродвигателя, так как при этом будет меняться величина напряжения генератора. Действительно, для цепи генератор-двигатель по II закону Кирхгофа можно составить следующее уравнение:
где Е г и Е д - соответственно э.д.с. генератора и электродвигателя;
R г и R д - соответственно сопротивление якорей генератора
И электродвигателя. Заменив э. д. с. электродвигателя, согласно выражению (7) ,. получим
Выражение (41) является уравнением скоростной характеристики исполнительного электродвигателя в системе Г-Д. Заменив в нем ток якоря выражением (28) , получим уравнение механической характеристики
Уравнения (41) и (42) показывают, что путем изменения Е г можно изменять скорость вращения исполнительного электродвигателя. Следовательно, при уменьшении сопротивления регулировочного реостата R p скорость исполнительного электродвигателя будет возрастать, а при увеличении сопротивления-уменьшаться, так как э. д. с. генератора Е г зависит от величины тока в обмотке ОВГ .
Нетрудно заметить, что механические и скоростные характеристики электродвигателя в системе Г-Д представляют собой прямые линии. Скорость холостого хода определяется первым членом правой части уравнения (41) или (42) и не остается постоянной величиной при различных значениях сопротивления R р , т. е. каждому значению сопротивления R р соответствует своя скоростная и механическая характеристики (рис. 15). Эти характеристики являются достаточно жесткими, что позволяет при применении специальных регулируемых электродвигателей получить широкий диапазон скоростей в пределах 1: 100 и более, что является одним из основных положительных качеств системы Г-Д.
Иногда регулировочный реостат включают не только в цепь обмотки ОВГ , но в цепь обмотки возбуждения ИД , что дает возможность регулировать скорость вверх от номинальной.
Регулирование скорости по системе Г-Д является весьма экономичным, так как все переключения происходят в цепях обмоток возбуждения, где токи сравнительно невелики. Относительно небольшие мощности и габариты регулировочных реостатов позволяют получить большое число регулировочных ступеней и, следовательно, достаточно плавное регулирование скорости. Возможно также применение реостатов со скользящими контактами, что позволяет получить бесступенчатое регулирование скорости.
Система Г-Д очень удобна не только в отношении широты и плавности регулирования скорости. Она позволяет также очень просто производить реверс и торможение исполнительного электродвигателя. Так, для осуществления реверса необходимо, как известно, изменить полярность на зажимах якоря электродвигателя. Для этого достаточно изменить направление тока в обмотке ОВГ (или в обмотке ОВД ). Для осуществления торможения достаточно отключить от возбудителя обмотку ОВГ . Небольшие размеры регулировочных реостатов позволяют широко использовать дистанционное управление системой Г-Д, что также является большим ее преимуществом.
Основной недостаток системы генератор-двигатель - большое количество электрических машин, высокая стоимость и относительно низкий к. п. д. установки, что, естественно, ограничивает область применения дайной системы.
Статьи по теме